Défis
🌐 Défi RSK 1 : "Mission Prêt ! Partez !" ⭐★★★★ 🌐
Afin d'avoir une vue d'ensemble sur le match et d'être dans une position optimale pour recevoir la balle de n'importe où, vous avez décidé d'accompagner votre robot bleu n°1 jusqu'au centre du terrain.
🎯 Réception à toute épreuve !
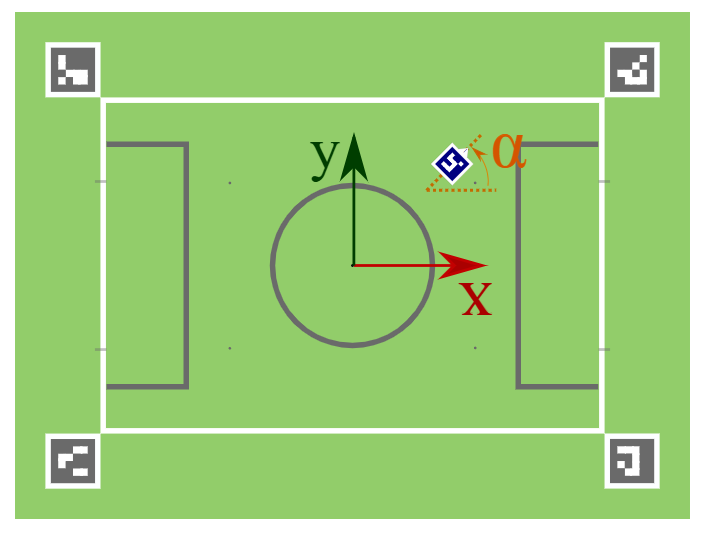
Une fois connecté, votre objectif est d'amener votre robot 1 vers le centre du terrain aux coordonnées x = 0 et y = 0.
Pour cela, vous utiliserez la redoutable commande Go To, qui ordonne à un robot d'aller à une position (x, y) avec une orientation theta.
client.<couleur><numeros>.goto((x,y,theta), wait=False)
Votre code ressemblera à ceci :
import rsk
with rsk.Client() as client:
while True:
client.blue1.goto((0,0,0), wait=False)
💡 Astuce 💡 :
Vous pouvez aussi récupérer votre robot grâce à la commande robots, ce qui permet d'avoir un code plus facilement maintenable :
myRobot = client.robots['<couleur>'][<numeros>]
🌐 Défi RSK 2 : "Dos à dos" ⭐⭐★★★ 🌐
Afin de couvrir une zone encore plus grande, vous avez décidé d'utiliser vos deux robots comme tours de garde.
🎯 I've got you in my sights
Votre mission sera de faire collaborer vos deux robots afin qu'ils couvrent la zone la plus large possible.
Tandis que l'un couvre la première partie du terrain avec x>0, l'autre se charge de la zone avec x<0.
Pour cela, vous pouvez réutiliser le programme précédemment écrit afin de positionner le robot bleu 1 en (1,0) et le robot bleu 2 en (−1,0).
Veillez également à ce que les deux robots regardent dans des directions opposées.
💡 Indice 💡 :
Vous pouvez donner des instructions à deux robots en même temps dans le même programme !
Si vous n’arrivez pas à faire en sorte que les deux robots regardent dans des directions opposées, pensez que l’orientation des robots est exprimée en radians !
🌐 Défi RSK 3 : "Mission Scan" ⭐⭐★★★ 🌐
Maintenant que vos robots sont prêts à s'adapter à toutes les situations, il reste à identifier ces situations ! Pour cela, vous devez connaître votre environnement.
🎯 Surveillance Maximal :
Lors de cette mission, vous devrez récupérer toutes les informations dynamiques sur le terrain, ce qui inclut les coordonnées des 4 robots ainsi que celles de la balle, et les afficher.
🧩 Défi Technique :
Votre code devra récupérer et afficher les positions X, Y de chacun des robots et de la balle. Cela nécessitera une attention méticuleuse aux données et une capacité à interpréter les informations en temps réel. Il est conseillé de consulter la documentation de RSK pour compléter ce défi (Cliquez ici))
👁🗨 Visualisation des Données :
Assurez-vous que les données soient présentées de manière claire et précise. Une bonne visualisation est essentielle pour comprendre le champ de bataille numérique.
Si vous êtes bloqué, voici un petit indice : indice
🌐 Défi RSK 4 : Mission "Défense offensive !"⭐⭐★★★ 🌐
Vous avez repérer que votre ennemi vert s'apprêtait a tirr dans vos cages ! Votre meilleur façon d'empêcher se tir est de foncer le plus vite possible vers la balle !
🔄 Votre Mission :
Réutilisez et adaptez ce que vous avez réalisé lors de vos deux précédentes missions afin de Récupérer la position de la balle donner à votre robot Bleu 1 la même position
🎯 Arrete la !
1 - Récupérez la position (x,y) de la balle à l’aide des informations disponibles sur le terrain.
2 - Donnez l’ordre à votre robot Bleu 1 d'aller vers cette position
🌐 Défi RSK 5 : Mission "Retour à la réalité"⭐⭐⭐★★ 🌐
Pour l'instant vous vous etes concentré a réaliser vos tests dans le simulateur, ne serait-il pas tant de tester en réalité !
🔄 Votre Mission :
Votre mission consistera en l'utilisation du game controlleur en l'apprentissage de la connexion avec celui-ci afin de faire bouger les robots en vrai ! Votre seconde mission sera de voir ce qu'il se passe lorsque l'un des robot n'est pas sur le terrain
💥 😱 COMMENT ÇA, VOTRE PROGRAMME CRASH ?!
cela veut dire que vous n'avez pas gérer les erreurs ! le fait que l'un des robot ou meme la balle sorte du terrain vous enleve une donnée a votre programme ! pour le corriger il suffi de faire un test si il manque une valeur votre programme fera quelque chose d'autre en conséquences
try:
#Votre code
except rsk.client.ClientError as e:
print(e)
#autre chose
💡 Astuce 💡 :
Vous pouvez aussi gérer chacune des erreurs afin de pouvoir continuer a bouger malgré la perte d'information par exemple vous pouvez definir d'une autre maniere les données perdu !
🌐 Défi RSK 6 : Mission "Sur mesure" ⭐⭐⭐⭐★ 🌐
Maintenant que vos robots sont prêts à attaquer, il est temps de leur apprendre l'art du positionnement précis pour devenir des attaquants redoutables ! Votre mission : placer votre robot juste derrière la balle sans la toucher, afin de pouvoir effectuer un tir parfait.
🎯 Derrière mais prêt à frapper !
Votre objectif est de positionner votre robot à une distance optimale de la balle, prenant en compte les dimensions suivantes :
Le rayon du robot (robot_radius),
Le rayon de la balle (ball_radius),
Une marge d’imprécision arbitraire que vous devrez mesurer par des tests en situation réelle.
La distance idéale correspondra à la somme des rayons plus cette marge d’imprécision.
🔄 Votre Mission :
Mesurez la marge d’imprécision en effectuant plusieurs essais avec votre robot derrière la balle.
Placez votre robot derrière la balle, en vous basant sur les constantes robot_radius et ball_radius, ainsi que sur la marge calculée.
Vérifiez que votre robot est bien positionné sans toucher la balle, si tel est le cas essayé de le faire un tir et voyez le résultat !
💡 Astuce :
Utilisez les constantes de la bibliothèque RSK pour simplifier votre code. Ces constantes sont disponibles dans le module rsk.constants
Voici un exemple d'utilisation :
import rsk
from rsk import constants
rayon_du_robot = constants.robot_radius
Pour une exploration rapide des constantes, tapez constants. et observez les suggestions. Si vous êtes curieux, appuyez sur CTRL + clic sur le mot constants pour accéder directement au code source. Attention : Ne modifiez rien dans ces fichiers 🤭.
🌐 Défi RSK 7 : Mission "Carton jaune" ⭐⭐⭐⭐⭐ 🌐
Maintenant que votre robot suit la balle vous vous rendez compte durant votre match qu'il ne peux pas rester a coté d'elle durant trop de temps sous peine de se prendre une pénalité ! mais on peux faire de cette penalité aussi un avantage !
🔄 Votre Mission :
Votre mission sera de detecter lorsque un robot est pénaliser, de cette maniere vous pourrez lorsque les deux robot attaquant sont pénaliser faire monter votre defenseur pour qu'il attaque !
Pour cela vous avez acces aux information du referee referee
🎯 A l'attaque !
1 - Récupérez les information de l'arbitre 2 - Vérifiez que les deux robot vert 1 et bleu 1 sont penalisés 3 - Faites monter votre defenseur en attaquant
Voici un exemple d'utilisation du referee :
import rsk
with rsk.Client() as client:
while True:
client.referee["game_is_running"] #Cette ligne renvoie True si la partie est débuté False sinon
🌐 Défi RSK 8 : Mission "visée a toute epreuve !" ⭐⭐⭐⭐⭐ 🌐
Lors de vos péripécie il vous vient a l'idée de cree un outils vous permettant de faire en sorte que l'un de vos robot regarde un point donné
🔄 Votre Mission :
Votre mission sera de réaliser une fonction python prenant 2 points en entrée en renvoyant un angle delta en sortie Voici un exemple de fonction réalisant une addition :
def addition(a,b): # Ici a et b sont les entrés
c = a+b # ici on réalise l'addition de a + b
return c # et ici on renvoie en sortie le résultat c
résultat = addition(2,3) # ainsi cette ligne réalisera l'addition de 2+3
print(résultat) # le print affichera alors 5
Afin de réaliser le calcul permettant à votre robot regarde un point il vous faudra faire de la trigonométrie !
💡 Indice 💡 :
Renseignez-vous sur la fonction arc tangente 2 ou atan2. En python vous pourrez utiliser math.atan2 sous reserve de import math.
🏆 Défi RSK Final : Mission "Match Ultime" ⭐⭐⭐⭐⭐ 🏆
Combinez tout ce que vous avez appris, et plus encore, pour créer un programme imparable. Que toutes les équipes vertes tremblent rien qu'en entendant votre nom ! 😈
C’est l’occasion de mettre en pratique toutes vos compétences et de créer une stratégie gagnante. Allez, faites briller votre robot et montrez à l’équipe verte qui est le vrai champion ! 💪⚽
⚽ Votre Mission :
Organiser un match impliquant deux équipes de robots. Chaque équipe doit essayer de marquer des buts tout en défendant son propre but.
🤖 Stratégie et Exécution :
- Programmez les robots pour qu'ils puissent se déplacer sur le terrain, contrôler la balle, et tirr au but.
- Implémentez des stratégies défensives pour que les robots puissent bloquer les tentatives de but de l'équipe adverse.
- Assurez une bonne communication et coordination entre les robots de la même équipe.
🌐 Les Défi RSK Continuent ⭐⭐⭐⭐⭐⭐⭐⭐⭐⭐ ! 🌐
Maintenant que votre match est passé, corrigez ce qui ne fonctionne pas, améliorez ce qui marche bien et inventez de nouvelles stratégies de jeu pour surprendre vos adversaires !
C’est le moment de peaufiner votre programme et d’explorer de nouvelles idées pour être encore plus performant. Gardez à l'esprit que l'innovation et l'adaptabilité sont les clés du succès ! 🚀